tecgihan 9軸運(yùn)動傳感器IMS-SD產(chǎn)品分析
[9軸運(yùn)動傳感器IMS-SD]
■ 使用 9 軸運(yùn)動傳感器測量競賽船的行為(3 人)
■ 賽艇中央安裝有9軸運(yùn)動傳感器���,用于監(jiān)控實(shí)際航向���。
測量和考慮劃船時的行為
特征
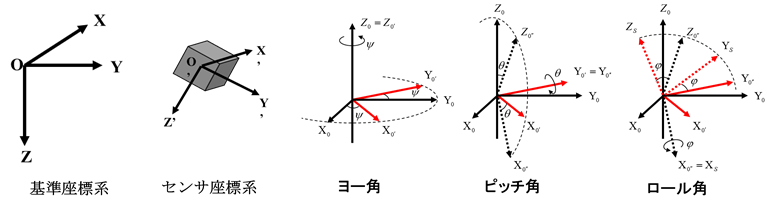
1��、三軸加速度�、三軸陀螺儀��、三軸地磁數(shù)據(jù)采集
2. 數(shù)據(jù)記錄至內(nèi)部SD卡(采樣1KHz)
3.使用藍(lán)牙的無線監(jiān)控(專用軟件)
4. 姿勢角度估計(jì)(僅針對輕柔動作)
主要規(guī)格
?尺寸 54mm x 42mm x 15mm
?重量 30g
?范圍加速度±30G�����、角速度±4000deg/s����、地磁±300μT
?最大采樣1KHz(在SD卡上記錄時)
?連續(xù)運(yùn)轉(zhuǎn)時間約2.5小時
?最多同時使用 20 臺設(shè)備
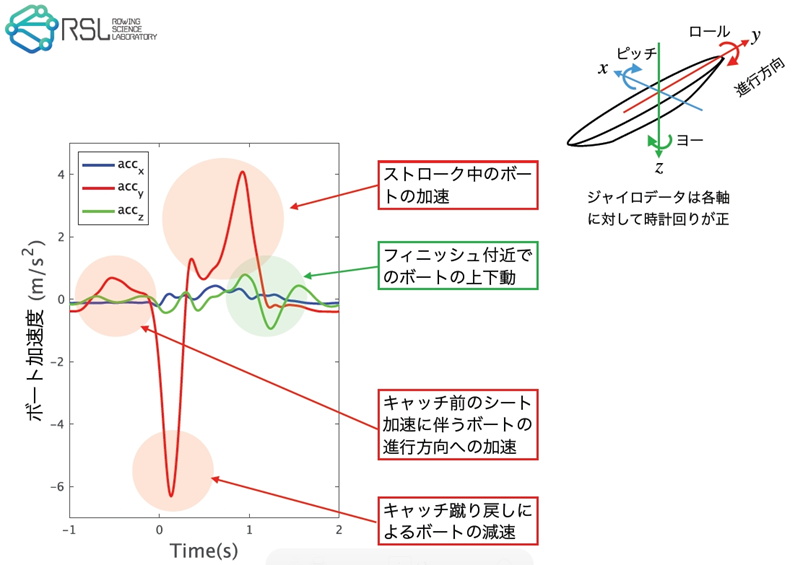
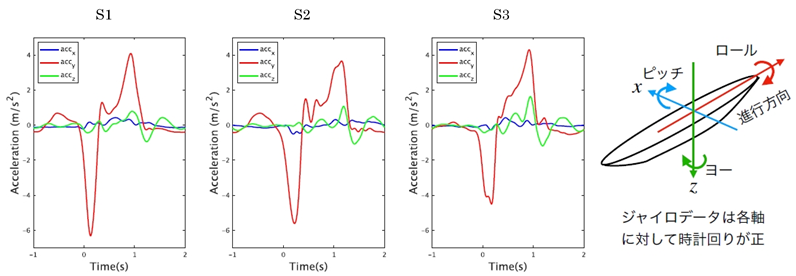
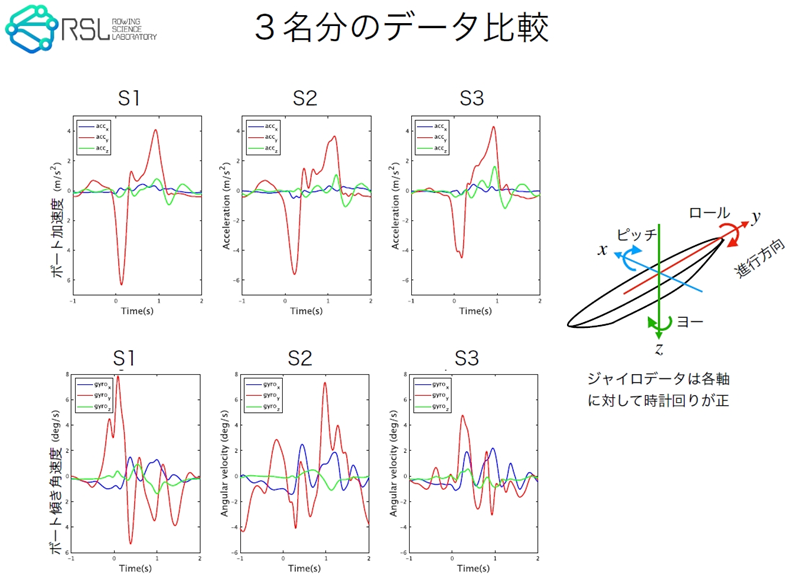
加速度變化(整個行程的平均波形)
[考慮縱向分量(紅線)]
?在S1和S2數(shù)據(jù)中,船在追上之前正在加速�����。
→座椅可能會向尾部加速��。
?由于擔(dān)架吸收了身體的加速度�����,因此船隨后的減速度很大。
→ 然而�,接住擔(dān)架時似乎受到了很大的力量����,
捕獲后立即的船加速度很強(qiáng)(克列什涅夫稱之為蹦床效應(yīng))
→捕獲后波形立即呈波浪狀�。
連接可能運(yùn)行不順暢。
?S3幾乎沒有座椅加速,抓球前的減速度也很小。
→乍一看不錯,但抓住后立即的船加速很弱。
→然而���,前半程的船加速是平穩(wěn)的。
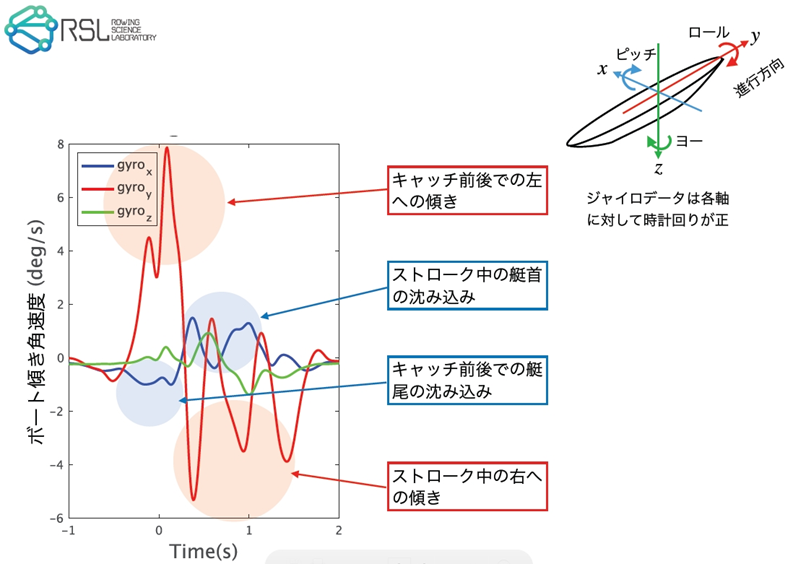
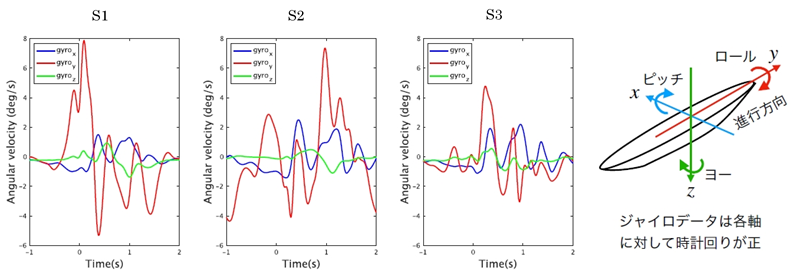
船橫傾角速度(整個行程的平均波形)
[滾動的考慮(紅線)]
?S1在接球前向左傾斜,在擊球過程中和接近終點(diǎn)時向右傾斜����。
?S2從前方開始從右向左傾斜接球��,然后在終點(diǎn)時大幅向左傾斜。
?S3似乎比S1.2更穩(wěn)定
?[間距的考慮(藍(lán)線)]
?捕捉前��,向船尾側(cè)下沉是S3中最小的(與加速度數(shù)據(jù)一致)
?在接球和結(jié)束時船尾下沉�����,但這種運(yùn)動是S1中最小的�����。
→但是���,如果劃動力大的話��,船尾也會下沉��,所以
似乎有必要衡量頂級運(yùn)動員以確定哪種模式是好的。
9軸IMU:IMU代表慣性測量單元(IMU)����。
![[9軸運(yùn)動傳感器IMS-SD]](https://tecgihan.co.jp/next23/wp-content/uploads/2020/03/IMG_8746.jpg)